It is essential for successful space missions to understand the environments they will operate in.
That is particularly important given a new generation of fully and semi-autonomous spacecraft are capable of operating in close proximity to each other.
These close rendezvous and proximity operations (RPO) make it possible to inspect, repair and monitor nearby spacecraft.
Space Situational Awareness (SSA) supports those functions, while advanced Systems Tool Kit (STK) modelling software can prepare spacecraft for related missions.
Extending STK for proximity operation modelling
STK Astrogator is an innovative application from our partner AGI, that designs, simulates and analyses proximity and perching manoeuvres already in use for operational satellites.
We have extended it to develop closed-loop control laws to:
- Manoeuvre spacecraft in close proximity to each other
- Perch and stare
- Conduct self-inspection
- Perform docking and other operations
How proximity works in space
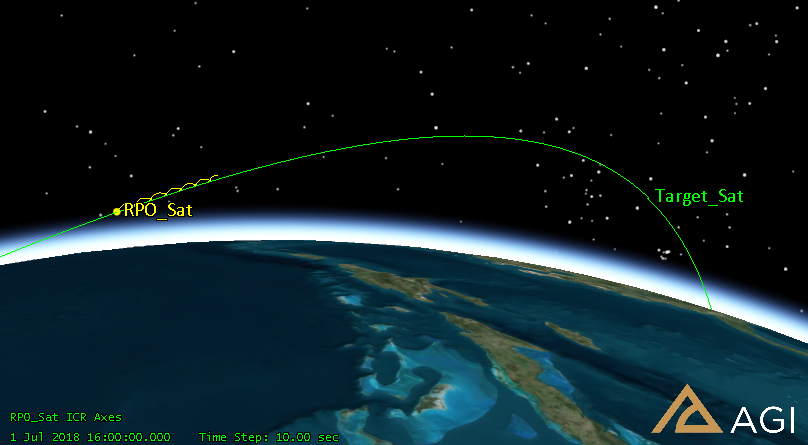
One spacecraft’s manoeuvring relative to another depends on a mission’s objectives. That might include, for example, carrying out an inspection.
For spacecraft inspection purposes, sensors define and drive distances, and proximity operations begin after a spacecraft’s rendezvous close to another. They meet at a designated location, then move alongside each other.
Using fuzzy logic for spacecraft manoeuvre modelling
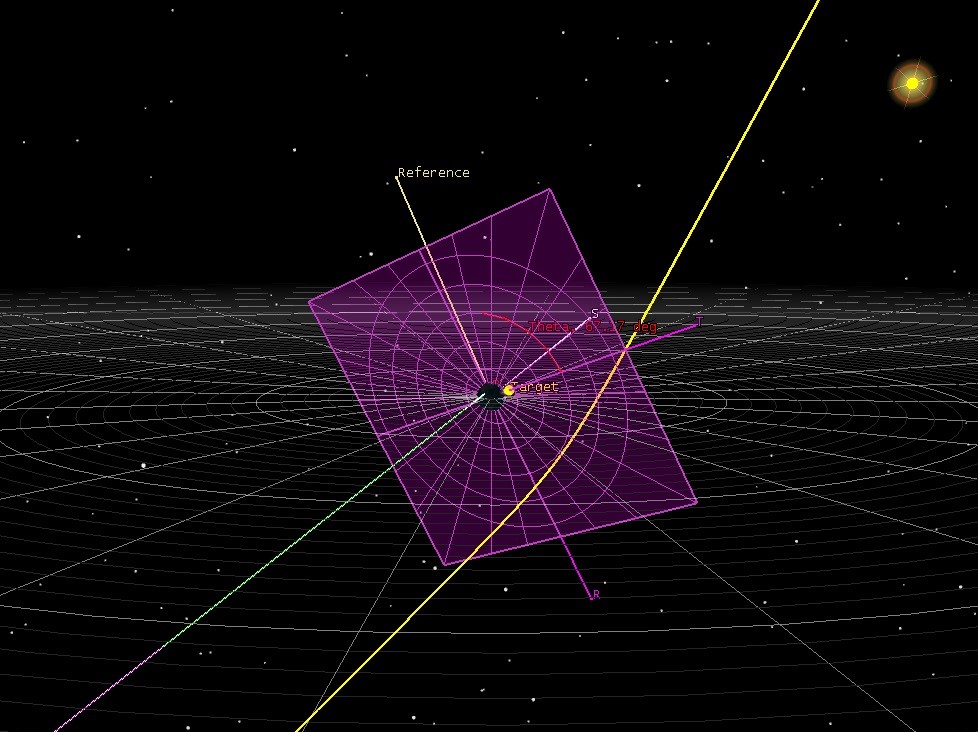
Fuzzy logic is a mathematical model for calculating the accelerations to manoeuvre one spacecraft (called the ‘Chase’) around another (referred to as the ‘Target’). It is a proven method for developing control laws in a range of critical systems.
A rigorous mathematical model, it is based on formulas and not probability.
The use of fuzzy logic enables encoding of the subject matter, which allows STK Astrogator to create a workable model for spacecraft proximity operations.
This form of modelling needs to be both quick and convenient, providing an adaptable and responsive support system for space missions.
Optimising spacecraft manoeuvring
Fuel efficiency requirements usually drive traditional operations involving the manoeuvring of spacecraft.
Launching into space is expensive, therefore performing manoeuvres to an optimal level is critical to a mission’s success. They might typically take hours or even days to complete, and a few dozen is considered excessive.
However modern robotic spacecraft enable these operations to be more rapid and frequent.
These missions rely on closed-loop control laws to maintain the desired trajectory and near instantaneous feedback from sensors to monitor how well they are meeting objectives. There can be little or no input from human controllers.
Modelling for proximity operations
Using STK Astrogator to simulate close rendezvous and proximity operations provides the following benefits:
- The capability to model missions from end-to-end in a complete, simulated RPO environment by providing closed-loop, knowledge-based examples
- Accurate simulation and visualisation to aid decision-making, including communicating complexities, risks and critical issues
- An accurate trajectory model, within an environment that already supports secondary mission requirements, such as communications, navigation and power
- Realistic physics-based simulation for the modelling, development and validation of control laws
- A collaborative environment for examining and carrying out the design and development of spacecraft parameters
- A precise, mathematical platform for the research and development of future spacecraft manoeuvring tasks and for operational planning and forensic analysis
If you’d like to find out more about how simulation can support your mission needs, please get in touch with us.